Hallo Leute,
hier im englischen Nachbarforum wurde von einer Geschwindigkeitssteigerung im Rückwärtsgang berichtet
http://forum.electricunicycle.…-speed-of-159mph-on-mini/
Angeblich sollte 15,9mp/H (25,5Km/H) möglich sein.
Das Problem beim Rückwärtigen aufsteigen und fahren ist allerdings, das dabei Links und Rechts vertauscht ist.
Deshalb ist es kaum möglich Unfallfrei zu fahren!
Lenke ich nach links geht es nach Rechts ab, das verstärkt zusätzlich den links impuls und dann Rumms.
Also müsste mann den Lenksensor in der Bewegungsrichtung umdrehen.
Ich habe mir mal die Mühe gemacht und das ganze auf Machbarkeit untersucht.
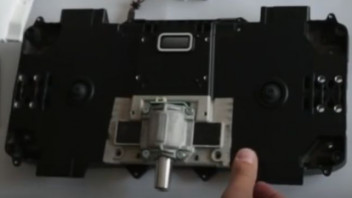
Also das Teil wie schon aus den bekannten Videos auseinandergebaut.
Unter diesen 4 Schrauben befindet sich der Lenksensor.

Lenksensor ausgebaut
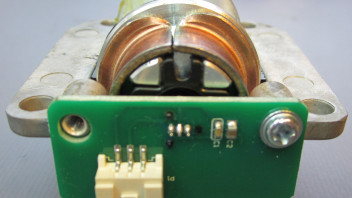
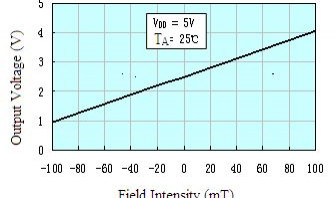
Auf der Platine ist ein Hallsensor vom Typ SS49E verbaut.
https://dscl.lcsr.jhu.edu/main…Hall_Sensor_Datasheet.pdf
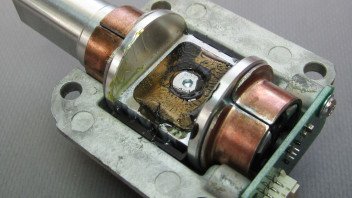
Hier sieht man 2 Permanentmagnete links und rechts - die sich um den Hallsensor drehen.
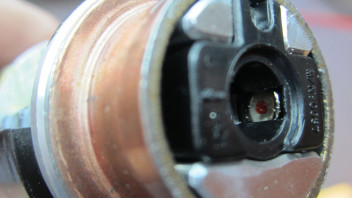

Die Magnete sind von hinten in den schwarzen Kunstoffhalter gesteckt, der mit einer Kreuzschlitzschraube fixiert ist.

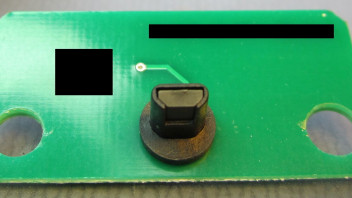
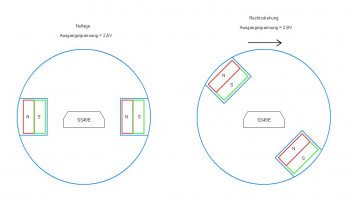
Auf dieser Zeichnung sieht man wie das Ganze funktioniert.
Steht der Lenkstock gerade, ist das Magnetfeld auf die Aktive Fläche des Sensors minimal. die Ausgangsspannung ist 2,5V.
Wird er gedreht wirkt das Magnetfeld immer stärker mit Nord oder Südpol auf die Aktive Fläche des Sensors,
die Spannung steigt oder sinkt(je nach Drehrichtung) um die 2,5V herum.
Was ist jetzt zu tun?
Um die Drehrichtung umzukehren muß also nur das Magnetfeld der beiden Magnete umgepolt werden.
Das geht ganz einfach:
Nach Lösen der Kreuzschlitzschraube den Kunstoffhalter mit den Magneten herausziehen.
Die beiden Magnete können jetzt nach hinten herausgeschoben werden (der Nordpol ist mit einer roten Punkt markiert).
Danach diese um 180Grad gedreht wieder in den Halter einsetzten.
Lenksensor zusammenbauen ,Finne montieren und Akku einsetzten.
Jetzt kann es sein das die Nullage nicht mehr stimmt, also das Teil steht nicht still, sondern dreht sich leicht in eine Richtung.
Der Grund hierfür sind die Toleranzen des Sensors, dieser sollte in Nullage genau 2,5V haben,
Ich hatte vor dem Umbau 2,45V, nach Magnetfelddrehung 2,55V gemessen.
Da der Bot auf diese Toleranz (2,45V) kalibriert worden ist, dreht er sich nach Umpolung des Feldes.
Als Abhilfe kann man die Sensorplatine leicht drehen, da die Befestigungslöcher eine gewisse Toleranz haben.
Wenn das nicht reicht, kann mit einer Feile nachgeholfen (habe minimal Nachgeholfen).
Nachdem das geschafft war, hatte ich das Problem das die Lenkempfindlich beim Rüchwärtsfahren zu scharf war.
Es war so, das bei kleinen Lenkausschlägen erst wenig gedreht wurde, dann aber extrem heftig - anders gesagt kein lineares Verhalten.
Glücklicherweise lässt sich das in den Einstellungen abstellen.
Automatic Steering Sensitivity war eingeschaltet - das Ausschalten und die Sensitivität manuell auf 0 Stellen bringt ein Neutrales Verhalten.
Zum Fahren habe ich den Knielenker montiert, mit dem Handlenker ist es nicht möglich, da die Hände dann nach hinten greifen müssen.
Auf gehts die erste Fahrt:
Diese fand gestern auf einem Privatgelände in kompletter Motorradmontur (Leder mit Protektoren) statt.
Da das Fahren mit Knielenker erstmal gewöhnungsbedürftig ist hab ich mich langsam an immer höhere Geschwindigkeiten herangetastet.
Gemessen wurde die Geschwindigkeit mit einem Funkfahradtacho (hatte ich hier auch schon beschrieben) - dieser ist auf die Ninebot App geeicht worden.
Um es kurz zu machen, die Feststellung der Engländer stimmt.
Es sind dauerhaft 25,0 Km/H möglich zu fahren, die Abriegelung beginnt bei 25,5 Km/H zum Einbremsen beschleunigt das Teil kurz auf 26,6Km/H
Fazit:
Es ist möglich unser Spielzeug schneller zu machen und das mit relativ wenig Aufwand.
Allerdings ist diese Geschwindigkeit zu hoch für unser Teil, eine Bodenunebenheit oder rutschiger Untergrund ist damit nicht mehr zu beherschen.
Ich baue jetzt alles wieder in den Legalen Originalzustand zurück.
Wichtiger Hinweis an alle Nachbauer:
Alles was Ihr macht auf eure eigene Gefahr - ich übernehme keine Verantwortung!
Mit diesem Umbau seit ihr jenseits aller Legalitäten - also nur für Privatgelände.
Gruss Donald




 Alles anzeigen
Alles anzeigen

